
The Marine Robotics Team was formed in 2011 from the MIT ORCA team for Autonomous Underwater Vehicles and the MIT Remotely Operated Vehicle (ROV) Team.
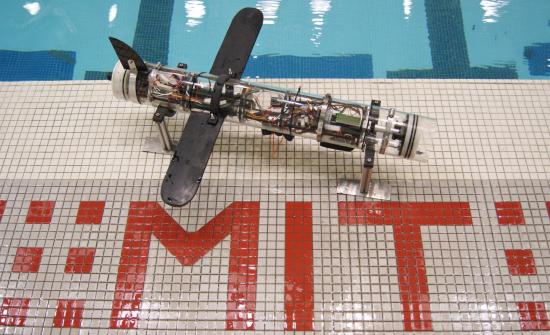
The ORCA and ROV teams focused on designing and building vehicles for annual competitions. The team transitioned from a competition-based team to the marine robotics team, which is focused on using fun, non-competitive projects to introduce students to ocean engineering concepts. Our current main project is an autonomous underwater vehicle (AUV) for the European Robotics League - Emergency Robots 2020 competition (moved to 2021), especially focusing on the underwater casualty search-and-report task. Through this, we aim to combine several different disciplines to accomplish a complex and practical mission. Past projects include an oil-sensing glider and a remotely operated vehicle (ROV) capable of autonomously tracking other vehicles. One of our main objectives as a student-run team is to provide the resources for undergraduates to learn how to apply engineering principles and to develop design skills.
AT A GLANCE
Number of Members:
13 members in 2020-2021
Team leaders:
Emilio Sison
Year began:
2011
Advisors:
Tom Consi
Location:
N51
Recent events:
MRT and Edgerton Instructor Ed Moriarty traveled to Ketchikan, Alaska, in summer of 2012 for the first sea trials of the team’s underwater glider. The team exceeded test requirements by running untethered in 300' of water and cycling down to a depth of 45'. In the fall of 2012 the team traveled to the Naval Surface Warfare Center (Carderock) in Bethesda, Maryland, for further trials of their glider.
Team Website
http://web.mit.edu/mrt_mit/index.html